Startups Are Developing Pollination Robots As Bee Populations Decline
Tags: opinion
Pollination robots with six arms are being developed for use in greenhouses in West Virginia, called StickBug. Their use could seem extremely necessary because out in a field, the plants are usually pollinated through either bees or wind-shaking flowers. But inside a greenhouse or a vertical farm that is indoor, there are far fewer chances of bees or wind, which implies that the tomato plants need additional help – which would now be in the form of robots. Unfortunately, not every greenhouse in the state will be receiving the help, as it would first come through to the main greenhouses that are in dire need of assistance.
Subscribe to our Youtube channel, new videos every week:
Pollination Robots- The Future Of Agriculture?
The StickBug, or the famed pollination robots, have been a major project from researchers who work at West Virginia University, with some funding from the U.S Department of Agriculture, which would be using computer vision algorithms in order to map out the environment indoors and learn where the flowers on the plants are, and which flowers would be in dire need of pollination. Then it would be reaching out with its six arms to pollinate the flowers.
Yu Gu, an engineering professor at WVU who has been heading the project has stated that the six arms could potentially be used for coordinated action. In the event that a flower was hiding behind a branch, the robot could use one of its arms to move the branch away, and with the other arm pollinate the flower.

Needless to say, this is quite a challenging action from any robotics point of view, but that is the major focus behind this four-year project of designing compact pollination robots. Gu has stated that a lot of the project would help in advancing robotics just as much as it would help in improving agriculture. The project also managed to receive close to $750,000 in funding from the Department of Agriculture through the National Robotics Initiative.
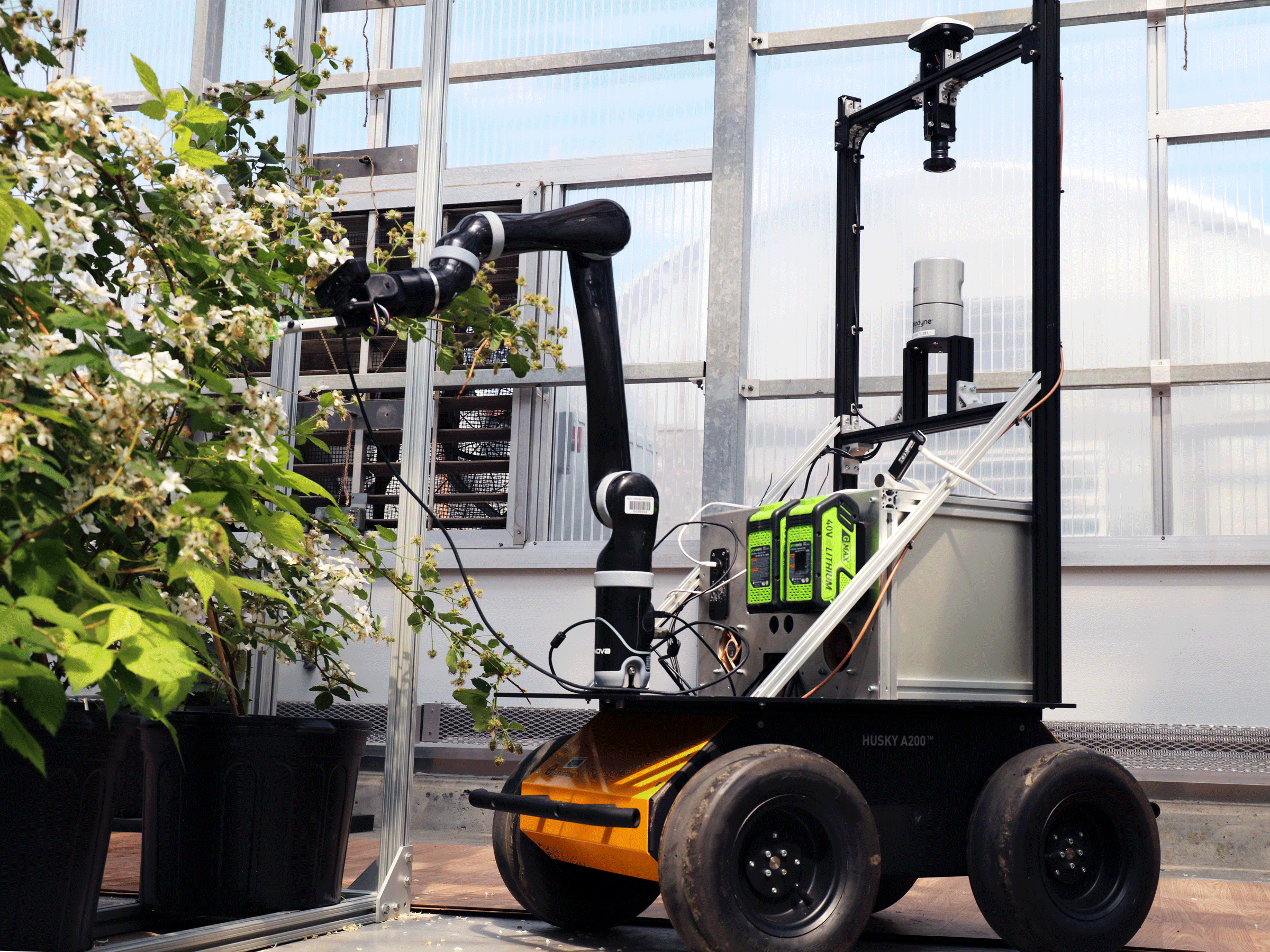
The work on the pollination robots is built on the previous work of Gu on a robotic pollinator called the BrambleBee. This robot was used in pollinating raspberries and blackberries and was developed as a proof of concept that robots could be used to do precise and accurate pollination- and not just pollinate by broadly blowing air or shaking plants- something other machines did in indoor farming. This StickBug project will also be tackling some of the major robotic challenges that are involved with pollinating, which includes speeding up the entire process so that it would be able to meet the requirements of production.
Pollination Robots Would Certainly Be a Boon To Most Growers
The pollination robots project would also be working with growers, who may not have in-depth knowledge about robotics, which is precisely why Gu and his team want to bring out low-cost robots that growers would be able to accept easily into the process. While the BrambleBee was all about focusing on bramble plants, this project would be useful towards pollinating tomatoes- which is definitely an economic crop that flowers throughout the year.
Also Read: THE SCIENCE OF SOUND AS MEDICINE
There are also quite a few reasons why growers would need pollination robots to help them pollinate their crops. One would be the decline in the population of bees, which are currently struggling in the face of a collapse of their colonies, climate change, and harmful pesticides. But there are also a few other places where bees simply can’t exist. Places like growth chambers are not conducive to the growth of bees- somewhere robots would be able to help.
Image Credit: Wu Gu/WVU
Leave Comment: